
In den Griff zu bekommen: Eine innovative mechanische controller-design für Roboter-assistierte Chirurgie
Wissenschaftler am Tokyo Institute of Technology entwickelt eine neue Art der Steuerung für den Roboterarm verwendet, in der Roboter-Chirurgie. Ihre Steuerung verbindet zwei unterschiedliche Arten von Greif verwendet in handelsüblichen Roboter-Systeme zu nutzen, die Vorteile, die Verringerung der Bemühungen der Chirurgen und die gute Präzision.
Robotik ist bahnten sich Ihren Weg in viele verschiedene Felder, und die Medizin ist keine Ausnahme; Roboter-assistierte Chirurgie erweitert hat drastisch in den letzten zehn Jahren in fast allen chirurgischen Teilgebiet. Roboter-assistierte Chirurgie wird in der Regel durchgeführt unter Verwendung von op-Roboter-Systeme, bei denen ein master-slave-Konfiguration, in der der „master“ ist eine controller-Gerät, das der Chirurg manipuliert Steuern einen Roboter-arm. Solche Systeme verbessern die Geschicklichkeit und Präzision des Chirurgen durch das herausfiltern von zittern der hand und die Skalierung Ihrer Handbewegungen in kleinere Bewegungen. Sie reduzieren auch das Risiko der häufigsten chirurgischen Komplikationen wie chirurgische Wundinfektion.
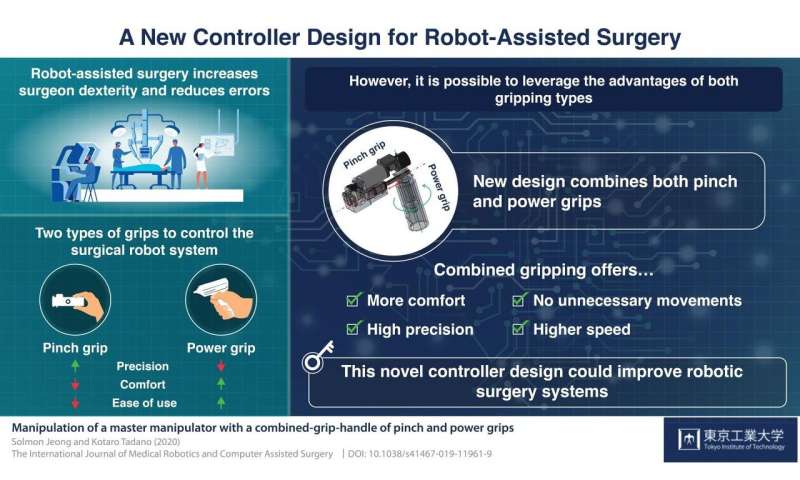
Allerdings, Roboter-assistierte Chirurgie hat seine eigenen Nachteile, besonders für die person, die Durchführung der Operation. Roboter-Chirurgen manchmal das Gefühl, körperliche Beschwerden während der Operation, die mit dem finger Müdigkeit sind Häufig. Dieses Unbehagen ist in Zusammenhang mit der Art und Weise, in der Sie Griff mit der master-controller. Zwei Arten von Griffen sind in der Regel verwendet, um zu Steuern op-Roboter: die „pinch grip“ und „power grip.“ Die pinch-grip wurde in der konventionellen Operationen für Jahrhunderte; es wird mit dem Daumen, mittleren und Zeigefinger, um eine hohe Präzision der Bewegungen. Auf der anderen Seite, der power-grip beinhaltet mit einem Griff mit der ganzen hand und ist besser geeignet für kraftvolle arbeiten und große Bewegungen.
Da die pinch-grip, die Spannung setzt auf bestimmte Muskeln der hand und der Finger, es ist eher die Müdigkeit verursachen. Und obwohl das power-grip scheint das nicht die Ursache solcher Beschwerden, es bietet weniger präzise Steuerung. Es besteht daher ein trade-off zwischen der Belästigung durch die pinch-grip und der fehlenden Feineinstellung der power-grip. Zum Glück, Herr Solmon Jeong und Dr. Kotaro Tadano, ein paar von Forschern vom Tokyo Institute of Technology (Tokyo Tech), eine kluge Lösung gefunden für dieses problem. In einer Studie veröffentlichte in Der Internationalen Fachzeitschrift Journal of Medical Robotics and Computer Assisted Surgery , die die Forscher spekulierten, dass ein master-controller, kombiniert beide Arten von packender gestaltet werden kann. Dr. Tadano erklärt, „In der Roboter-Chirurgie, die Grenzen der beiden konventionellen Methoden greifen, sind stark in Bezug auf die Vorteile und Nachteile der einzelnen Greif-Typ. So wollten wir untersuchen, ob eine kombinierte Greif-Methode kann zur Verbesserung der manipulation Leistung während der Roboter-Chirurgie, wie Sie diese nutzen können, die Vorteile der beiden Typen greifen, während ein Ausgleich für Ihre Nachteile.“
Nach einem proof-of-concept-experiment, das vielversprechende Ergebnisse, die die Forscher entwickelt, ein Roboter-Chirurgie-system mit einem modularen master-controller, die angepasst werden könnten, zu beschäftigen, entweder kneifen, Strom oder kombiniert zu greifen. Das system wurde getestet durch ein experiment zeigen, in dem 15 Teilnehmer hatten sich für die Steuerung eines Roboterarms zu bringen, die Spitze einer Nadel in die Ziel-Löcher in die geringste Menge an Zeit, ohne Sie zu berühren Hindernisse. Verschiedene Bedingungen wurden getestet für jedes packende Art, wie die Verwendung von arm-und palm ruht, die Verwendung von Hebel -, Greif-Typ “ und pinch grip Bewegung. Die Ergebnisse zeigten, dass die kombinierte grip ergab eine bessere Leistung in der pointing-experiment an verschiedenen Fronten, einschließlich der Anzahl der Fehler (Berührung mit einem Hindernis), – Zeit erforderlich, und die Gesamtlänge der Bewegungen durchgeführt, um die Ziele zu erreichen. Viele Teilnehmer berichteten auch, Sie bevorzugen die kombinierten Greif-Methode gegenüber den anderen beiden, wegen der Leichtigkeit und Komfort bei der Verwendung dieser Methode.


